
参考价格
面议型号
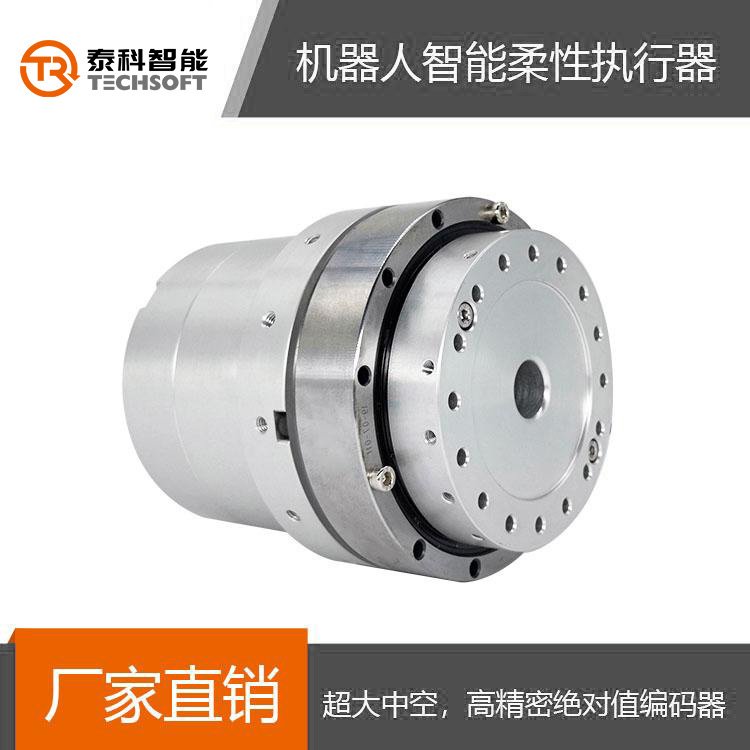
RJS14机器人关节模组品牌
泰科智能产地
深圳样本
暂无看了泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM的用户又看了
 留言询价
留言询价
虚拟号将在 180 秒后失效
使用微信扫码拨号


【主要特性】

减速器采用中空超扁平设计,结构更紧凑,整机更小巧,执行器自重更轻<1.5kg
执行器根据实际需求定制安装抱闸,让机器人开发更自由
高精度**值编码器,精准控制运动轨迹,多圈**值编码器分辨率标配16单圈和16多圈,保障机器人定位更精准、运行轨迹的稳定性更好
减少机器人开发过程中执行器的研发成本及人员投入
主要面向科研教学,医疗仪器领域
智能执行器SHD主要分为:SHD-14、SHD-17及更多系列敬请期待...
【规则参数】

| 基本性能 | |||||||
| 参数类型 | 单位 | SHD14A | SHD17A | SHD14B(中空) | SHD17B(中空) | SHD20-B | SHD14-B2 |
| 许用负载转矩 | Nm | 28 | 54 | 28 | 54 | 82 | 28 |
| 平均负载转矩 | Nm | 7.8 | 24 | 7.8 | 24 | 40 | 7.8 |
| **瞬时转矩 | Nm | 54 | 110 | 54 | 110 | 147 | 54 |
| 额定转速 | rpm | 29.7 | 19.8 | 29.7 | 19.8 | 29 | 29.7 |
| **转速 | rpm | 42.5 | 35 | 42.5 | 35 | 35 | 42.5 |
| 定位精度 | 度 | 0.001 | 0.001 | 0.001 | 0.001 | 0.001 | 0.001 |
| 电气性能 | |||||||
| 额定电流 | A | 4.2 | 5.7 | 4.2 | 5.7 | 6 | 4.2 |
| 峰值电流 | A | 10.5 | 14.25 | 10.5 | 14.25 | 15 | 10.5 |
| 工作电压 | V | 48 | 48 | 48 | 48 | 48 | 48 |
| 输出功率 | W | 118 | 148 | 118 | 148 | 200 | 118 |
| 通讯协议 | -- | Ethercat/Canopen | |||||
| 机械性能 | |||||||
| 直径 | mm | 70 | 80 | 70 | 80 | 90 | 70 |
| 长度 | mm | 75 | 82 | 76 | 82 | 88 | 93 |
| 重量 | kg | 1.07 | 1.458 | 1.26 | 1.458 | 2.2 | 1.5 |
| 减速比 | -- | 101 | 101 | 101 | 101 | 101 | 101 |
| 抱闸 | -- | 无 | 无 | 无 | 无 | 无 | 有 |
| **值编码器 | Bit | 16位单圈/16位多圈**值 | 16位单圈/16位多圈**值(可选20000P/R增量编码器) | ||||
| 温/湿度 | |||||||
| 工作温度 | -- | 0 - 50℃ | |||||
| 湿度 | -- | 90%相对湿度(非冷凝) | |||||
| 环境要求 | |||||||
| IP等级 | -- | IP54 | |||||
【机械尺寸外形图】






暂无数据!
 泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM的工作原理介绍?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM的使用方法?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM多少钱一台?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM使用的注意事项泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM的说明书有吗?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM的操作规程有吗?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM的报价含票含运费吗?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM有现货吗?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM包安装吗?
泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM的工作原理介绍?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM的使用方法?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM多少钱一台?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM使用的注意事项泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM的说明书有吗?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM的操作规程有吗?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM的报价含票含运费吗?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM有现货吗?泰科智能RJS14机器人关节模组 柔性一体化关节模块 支持OEM包安装吗?




































































































































 手机版:
手机版:













